Die Verwendung von Arduino zur Steuerung von Motoren ist eine spannende Möglichkeit, verschiedene Projekte zu realisieren. Mit Arduino können Sie DC-Motoren, Servo-Motoren und Schrittmotoren steuern, die jeweils für unterschiedliche Anwendungen geeignet sind. Während DC-Motoren einfach zu verbinden sind und sich gut für grundlegende Aufgaben eignen, bieten Servo- und Schrittmotoren höhere Präzision und Kontrolle, die in fortgeschritteneren Anwendungen erforderlich sind.
In diesem Artikel erfahren Sie, wie Sie diese Motoren effektiv mit Arduino ansteuern können. Sie lernen die Grundlagen der Motorsteuerung, die erforderlichen Komponenten und die Programmierung, um Ihre Projekte zum Leben zu erwecken.
Wesentliche Informationen:
- DC-Motoren sind einfach zu verwenden und bieten Geschwindigkeitskontrolle über Pulsweitenmodulation (PWM).
- Ein H-Bridge-Schaltkreis ist notwendig, um die Drehrichtung von DC-Motoren zu steuern.
- Servo-Motoren ermöglichen präzise Bewegungen und sind ideal für Anwendungen wie Roboterarme.
- Schrittmotoren bieten hohe Präzision und sind häufig in 3D-Druckern und CNC-Maschinen zu finden.
- Es wird empfohlen, separate Stromversorgungen für Motoren und Arduino zu verwenden, um Spannungsschwankungen zu vermeiden.
Arduino und DC-Motor: Einfache Steuerung verstehen und umsetzen
Die Steuerung von DC-Motoren mit Arduino ist eine grundlegende Fähigkeit, die Ihnen ermöglicht, verschiedene Projekte zu realisieren. DC-Motoren sind einfach zu verbinden und bieten eine unkomplizierte Möglichkeit, mechanische Bewegungen zu erzeugen. Sie werden durch Spannung betrieben und können in ihrer Geschwindigkeit über Pulsweitenmodulation (PWM) gesteuert werden, was eine präzise Kontrolle ermöglicht. Diese Technik funktioniert, indem das Arduino-Signal zwischen hohen und niedrigen Spannungen wechselt, wodurch die durchschnittliche Spannung, die der Motor erhält, variiert wird.
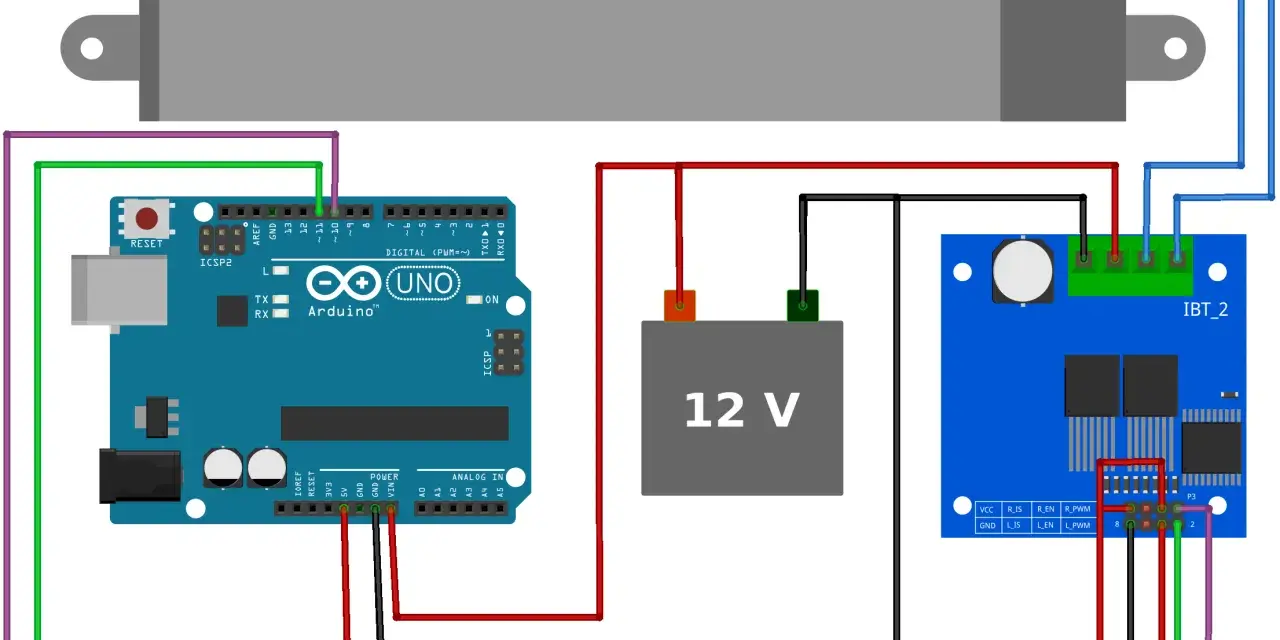
Um die Drehrichtung eines DC-Motors zu steuern, ist ein H-Bridge-Schaltkreis erforderlich. Ein einzelner Transistor kann die Drehrichtung nicht umkehren, daher ermöglicht die H-Bridge, dass der Strom in beide Richtungen durch den Motor fließt. Dies ist besonders wichtig für Anwendungen in der Robotik oder in automatisierten Systemen. Das Arduino sendet Steuersignale an die H-Bridge, die dann die hohe Stromstärke bereitstellt, die der Motor benötigt, da das Arduino selbst nicht genügend Strom liefern kann.
Grundlagen der DC-Motorsteuerung mit Arduino erlernen
Bei der Steuerung von DC-Motoren ist es wichtig, die Funktionsweise von Pulsweitenmodulation (PWM) und der H-Bridge zu verstehen. PWM ermöglicht es, die Geschwindigkeit des Motors zu variieren, indem die Zeit, in der das Signal hoch ist, im Vergleich zur Zeit, in der es niedrig ist, angepasst wird. Die H-Bridge besteht aus vier Transistoren, die in einer speziellen Konfiguration angeordnet sind, um den Stromfluss zu steuern und die Drehrichtung des Motors zu ändern.
- DC-Motoren sind ideal für einfache Anwendungen, bei denen keine hohe Präzision erforderlich ist.
- PWM ermöglicht eine feine Anpassung der Motorgeschwindigkeit, was für verschiedene Projekte nützlich ist.
- Die Verwendung einer H-Bridge ist entscheidend für die bidirektionale Steuerung von DC-Motoren.
| Komponente | Beschreibung |
| Arduino Uno | Beliebtes Mikrocontroller-Board zur Motorsteuerung. |
| DC-Motor | Einfacher Motor, der mit Gleichstrom betrieben wird. |
| L293D H-Bridge | Schaltkreis zur Steuerung der Drehrichtung und Geschwindigkeit von DC-Motoren. |
Codebeispiele für die Ansteuerung von DC-Motoren nutzen
Die Programmierung eines DC-Motors mit Arduino ist relativ einfach und ermöglicht es Ihnen, verschiedene Bewegungen zu steuern. Ein typisches Beispiel ist die Verwendung der Pulsweitenmodulation (PWM), um die Geschwindigkeit des Motors zu regeln. Hier ist ein einfaches Beispiel, das zeigt, wie Sie einen DC-Motor mit einem Arduino Uno und einer H-Bridge steuern können:
const int motorPin1 = 3; // PWM Pin für den Motor
const int motorPin2 = 4; // Pin für die Richtung
void setup() {
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
}
void loop() {
digitalWrite(motorPin2, HIGH); // Motor in eine Richtung drehen
analogWrite(motorPin1, 255); // Volle Geschwindigkeit
delay(2000); // 2 Sekunden warten
digitalWrite(motorPin2, LOW); // Motor in die andere Richtung drehen
delay(2000); // 2 Sekunden warten
}
In diesem Code wird der Motor zunächst in eine Richtung gedreht, indem der motorPin2 auf HIGH gesetzt wird. Die Geschwindigkeit wird mit analogWrite auf den maximalen Wert von 255 eingestellt. Nach zwei Sekunden wechselt der Code die Drehrichtung des Motors, indem motorPin2 auf LOW gesetzt wird. Diese einfache Programmierlogik zeigt, wie Sie mit wenigen Zeilen Code die Steuerung eines DC-Motors umsetzen können.
- Arduino Motorsteuerung: Die Arduino Motorsteuerung-Bibliothek vereinfacht die Ansteuerung von DC-Motoren und bietet Funktionen für die Geschwindigkeitsregelung.
- AccelStepper: Diese Bibliothek ist hauptsächlich für Schrittmotoren gedacht, kann aber auch für DC-Motoren verwendet werden, um komplexere Bewegungen zu ermöglichen.
- AFMotor: Eine weitere nützliche Bibliothek, die speziell für die Steuerung von DC-Motoren mit Arduino-Boards entwickelt wurde.
| Bibliothek | Beschreibung |
| Arduino Motorsteuerung | Einfach zu verwendende Bibliothek für die Steuerung von DC-Motoren. |
| AccelStepper | Ermöglicht die Steuerung von Schrittmotoren und kann auch für DC-Motoren verwendet werden. |
| AFMotor | Speziell für die Steuerung von DC-Motoren und Schrittmotoren mit Arduino entwickelt. |
Ansteuerung von Servo-Motoren: Schritt-für-Schritt-Anleitung
Die Steuerung von Servo-Motoren mit Arduino ist eine hervorragende Möglichkeit, präzise Bewegungen zu realisieren. Um einen Servo-Motor anzuschließen, benötigen Sie lediglich drei Verbindungen: die Stromversorgung (VCC), den Masseanschluss (GND) und das Steuersignal (Signal). In der Regel wird das Signal an einen PWM-fähigen Pin des Arduino angeschlossen. Hier ist ein einfaches Beispiel für die Verkabelung:
Servo Motor Pin -> Arduino Pin 9 (Signal)
VCC -> 5V (Stromversorgung)
GND -> GND (Masse)
Um den Servo-Motor zu steuern, verwenden wir die Servo-Bibliothek von Arduino. Hier ist ein Beispielcode, der zeigt, wie Sie einen Servo-Motor auf eine bestimmte Position bewegen können:
#include
Servo meinServo; // Erstellen eines Servo-Objekts
void setup() {
meinServo.attach(9); // Servo an Pin 9 anschließen
meinServo.write(90); // Servo auf 90 Grad positionieren
}
void loop() {
// Hier können weitere Bewegungen implementiert werden
}
In diesem Code wird der Servo-Motor auf 90 Grad eingestellt, was eine mittlere Position darstellt. Die attach-Methode verbindet den Servo mit dem angegebenen Pin, während die write-Methode den Servo auf den gewünschten Winkel bewegt. Diese einfache Programmierung zeigt, wie Sie mit wenig Aufwand präzise Bewegungen mit einem Servo-Motor realisieren können.
Anwendungsbeispiele für Servo-Motoren in Projekten entdecken
Servo-Motoren finden in vielen Projekten Anwendung, bei denen präzise Bewegungen erforderlich sind. Ein typisches Beispiel ist ein Roboterarm, der mit mehreren Servo-Motoren ausgestattet ist, um verschiedene Bewegungen auszuführen. Diese Roboterarme können in der Automatisierungstechnik eingesetzt werden, um Objekte zu greifen oder zu bewegen. Ein weiteres Beispiel ist die Verwendung von Servo-Motoren in automatisierten Türen, die sich je nach Bedarf öffnen und schließen lassen.
Ein weiteres spannendes Projekt ist die Verwendung von Servo-Motoren in Modellflugzeugen. Hier steuern die Servos die Klappen und das Höhenruder, was eine präzise Steuerung des Flugzeugs ermöglicht. Diese Anwendungen zeigen, wie vielseitig Servo-Motoren in der Praxis sind und wie sie in verschiedenen Bereichen eingesetzt werden können.
| Projekt | Beschreibung |
| Roboterarm | Ermöglicht präzise Bewegungen zum Greifen und Manipulieren von Objekten. |
| Automatisierte Tür | Öffnet und schließt sich automatisch, gesteuert durch Sensoren. |
| Modellflugzeug | Steuert Klappen und Ruder für präzise Flugmanöver. |
Schrittmotoren effizient steuern: Hohe Präzision erreichen
Die Verwendung von Schrittmotoren mit Arduino ermöglicht eine präzise Kontrolle über Bewegungen, die in vielen Anwendungen erforderlich sind. Schrittmotoren bewegen sich in diskreten Schritten, was bedeutet, dass sie eine exakte Positionierung ermöglichen. Diese Eigenschaft macht sie ideal für den Einsatz in 3D-Druckern, CNC-Maschinen und anderen automatisierten Systemen. Durch die Verwendung von speziellen Steuerungstechniken können Sie die Genauigkeit und Effizienz Ihrer Projekte erheblich steigern.
Ein weiterer Vorteil von Schrittmotoren ist, dass sie eine hohe Haltekraft bieten, selbst wenn sie sich nicht bewegen. Dies ist besonders nützlich in Anwendungen, in denen die Position des Motors während des Betriebs stabil bleiben muss. Die Steuerung dieser Motoren erfordert jedoch eine präzise Sequenzierung der Steuersignale, die oft durch Bibliotheken wie AccelStepper oder Stepper vereinfacht wird. Diese Bibliotheken helfen dabei, die Komplexität der Motorsteuerung zu reduzieren und ermöglichen eine einfache Implementierung in Ihren Arduino-Projekten.
Steuerung von Schrittmotoren mit Arduino: Techniken und Tipps
Um einen Schrittmotor mit Arduino zu steuern, können Sie verschiedene Bibliotheken nutzen, die speziell für diese Motoren entwickelt wurden. Eine der bekanntesten Bibliotheken ist AccelStepper, die es ermöglicht, die Bewegung des Motors präzise zu steuern und verschiedene Bewegungsprofile zu implementieren. Hier ist ein einfaches Beispiel, wie Sie einen Schrittmotor mit der AccelStepper-Bibliothek ansteuern können:
#include
AccelStepper stepper(1, 2, 3); // (Schrittmodus, Schritt-Pin, Richtung-Pin)
void setup() {
stepper.setMaxSpeed(100); // Maximale Geschwindigkeit
stepper.setAcceleration(50); // Beschleunigung
}
void loop() {
stepper.moveTo(200); // Bewege zu Position 200
stepper.run(); // Führe die Bewegung aus
}
In diesem Beispiel wird ein Schrittmotor mit einem definierten Schrittmodus, Schritt-Pin und Richtung-Pin initialisiert. Die setMaxSpeed- und setAcceleration-Methoden ermöglichen es, die Geschwindigkeit und Beschleunigung des Motors anzupassen. Mit der moveTo-Methode können Sie den Motor zu einer bestimmten Position bewegen, während die run-Methode die Bewegung tatsächlich ausführt. Diese einfache Programmierung zeigt, wie Sie die Vorteile von Schrittmotoren in Ihren Projekten nutzen können.
- AccelStepper: Eine leistungsstarke Bibliothek zur Steuerung von Schrittmotoren mit Unterstützung für verschiedene Bewegungsprofile.
- Stepper: Eine grundlegende Bibliothek für die Steuerung von Schrittmotoren, die einfache Funktionen für die Bewegung bietet.
- EasyDriver: Eine Bibliothek, die speziell für die Verwendung mit dem EasyDriver-Motortreiber entwickelt wurde, um die Steuerung von Schrittmotoren zu vereinfachen.
| Bibliothek | Beschreibung |
| AccelStepper | Ermöglicht präzise Steuerung und verschiedene Bewegungsprofile für Schrittmotoren. |
| Stepper | Einfach zu verwendende Bibliothek für grundlegende Schrittmotorsteuerung. |
| EasyDriver | Optimiert für den Einsatz mit dem EasyDriver-Motortreiber zur Steuerung von Schrittmotoren. |
Typische Anwendungen von Schrittmotoren in der Praxis
Schrittmotoren sind in vielen Bereichen unverzichtbar, insbesondere dort, wo präzise Positionierung erforderlich ist. Ein herausragendes Beispiel ist der Einsatz in 3D-Druckern. Hier steuern Schrittmotoren die Bewegung der Druckköpfe und des Druckbetts, um Schichten genau zu platzieren und so komplexe Objekte zu erstellen. Diese präzise Steuerung ermöglicht es, feine Details in den Druckergebnissen zu erreichen, was in der Prototypenentwicklung und der Herstellung von maßgeschneiderten Bauteilen von großer Bedeutung ist.
Ein weiteres typisches Anwendungsgebiet ist die CNC-Bearbeitung, bei der Schrittmotoren die Fräswerkzeuge steuern. In CNC-Maschinen bewegen diese Motoren das Werkzeug mit höchster Genauigkeit entlang der definierten Pfade, um Materialien wie Holz, Metall oder Kunststoff zu bearbeiten. Diese Anwendungen zeigen, wie wichtig Schrittmotoren in der modernen Fertigung sind, um hohe Qualitätsstandards und Effizienz zu gewährleisten.
| Anwendung | Beschreibung |
| 3D-Drucker | Steuert Druckköpfe und Druckbett für präzise Schichtplatzierung. |
| CNC-Bearbeitung | Bewegt Fräswerkzeuge mit hoher Genauigkeit entlang definierter Pfade. |
| Automatisierte Testgeräte | Ermöglicht präzise Bewegungen zur Durchführung von Tests an Proben. |
Innovative Anwendungen von Schrittmotoren in der Robotik
Ein aufregendes Feld, das sich aus der Verwendung von Schrittmotoren ergibt, ist die Robotik. Schrittmotoren sind besonders nützlich in der Robotik, da sie eine präzise Steuerung der Bewegungen von Robotern ermöglichen. In modernen Robotersystemen werden sie häufig in Greifarmen und mobiler Robotik eingesetzt, um exakte Bewegungen und Positionierungen zu erreichen. Durch den Einsatz von Schrittmotoren können Roboter komplexe Aufgaben wie das Sortieren von Objekten oder das Navigieren durch unwegsames Gelände effizient ausführen.
Ein weiterer aufkommender Trend ist die Integration von intelligenten Steuerungssystemen in Kombination mit Schrittmotoren. Diese Systeme nutzen Algorithmen des maschinellen Lernens, um die Bewegungen in Echtzeit zu optimieren und anzupassen, was die Effizienz und Flexibilität der Roboter erhöht. Diese Fortschritte könnten die Entwicklung von autonomen Robotern vorantreiben, die in der Lage sind, sich in dynamischen Umgebungen anzupassen und selbstständig Entscheidungen zu treffen. Solche Anwendungen zeigen, wie Schrittmotoren nicht nur in der Fertigung, sondern auch in der fortschrittlichen Robotik eine Schlüsselrolle spielen können.