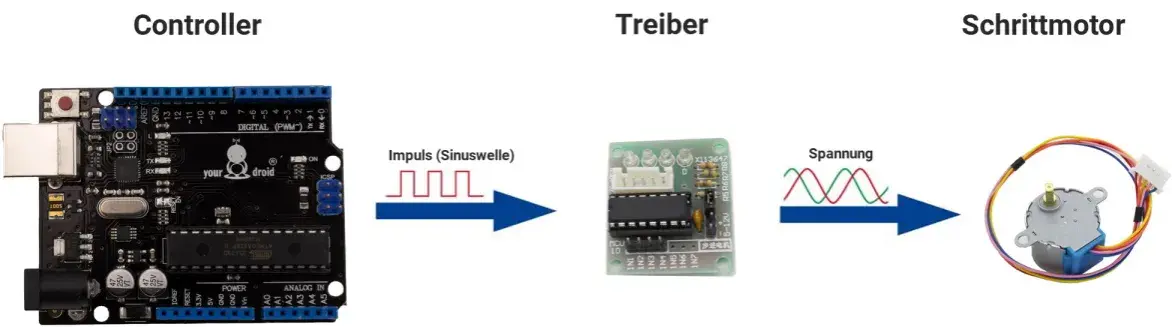
Ein Schrittmotor ist ein leistungsstarkes Werkzeug, das in vielen modernen Anwendungen eingesetzt wird, von Robotertechnik über 3D-Drucker bis hin zu CNC-Maschinen. Mit einem Arduino lassen sich diese Motoren präzise steuern, was sie ideal für Projekte macht, die eine genaue Winkelpositionierung erfordern. Schrittmotoren bewegen sich in diskreten Schritten, wobei ihre Position durch die Anzahl der an den Motor gesendeten Impulse bestimmt wird. Dies ermöglicht eine hohe Präzision, ohne dass Rückmeldesensoren erforderlich sind.
In diesem Artikel erfährst du, wie du einen Schrittmotor mit einem Arduino verbinden und programmieren kannst. Wir werden die verschiedenen Typen von Schrittmotoren und Treibern betrachten, die für die Steuerung benötigt werden, sowie die Programmierung mit der Stepper-Bibliothek und fortgeschritteneren Optionen wie der AccelStepper-Bibliothek. So kannst du die Bewegungen deiner Projekte effizient und präzise steuern.
Kernpunkte:
- Schrittmotoren ermöglichen präzise Bewegungen in diskreten Schritten.
- Es gibt zwei Haupttypen von Schrittmotoren: unipolar und bipolar.
- Ein Treiber-IC ist erforderlich, um die Motoren sicher mit einem Arduino zu steuern.
- Die Stepper-Bibliothek vereinfacht die Programmierung der Motorsteuerung.
- Die AccelStepper-Bibliothek bietet erweiterte Steuerungsoptionen für sanfte Beschleunigung und Verzögerung.
- Praktische Anwendungen umfassen Robotik, 3D-Druck und CNC-Maschinen.
Schrittmotor anschließen: Schritt-für-Schritt-Anleitung für Anfänger
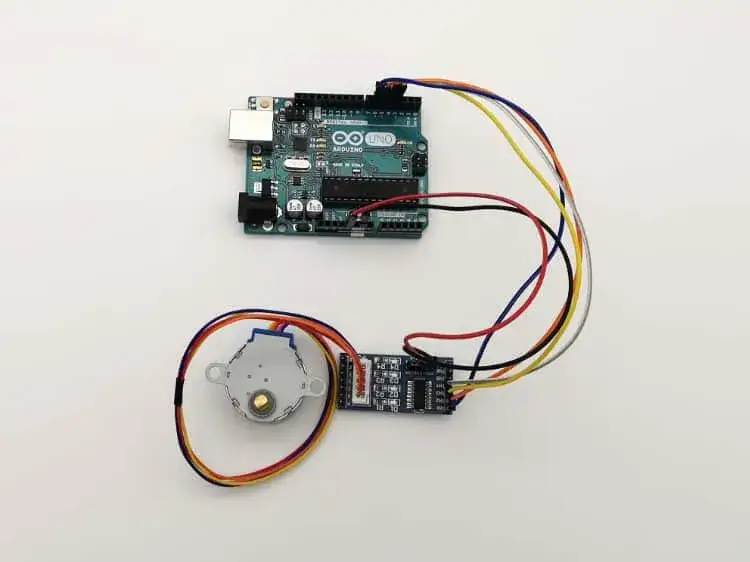
Beim Anschließen eines Schrittmotors an ein Arduino ist es entscheidend, die richtigen Schritte zu befolgen, um sicherzustellen, dass alles reibungslos funktioniert. Eine ordnungsgemäße Verbindung ist nicht nur für die Funktionalität wichtig, sondern auch für die Sicherheit. Fehlerhafte Verbindungen können zu Schäden am Motor oder am Arduino führen. Daher ist es wichtig, sich vor dem Start über die notwendigen Werkzeuge und Materialien zu informieren.
Zu den grundlegenden Werkzeugen gehören ein Lötkolben, Drahtschneider und ein Multimeter zur Überprüfung der Verbindungen. Außerdem solltest du sicherstellen, dass du über die richtigen Komponenten verfügst, wie z.B. den passenden Schrittmotor und einen Treiber. Achte darauf, dass alle Verbindungen fest und sicher sind, um Kurzschlüsse zu vermeiden. Mit den richtigen Vorbereitungen kannst du sicherstellen, dass dein Projekt erfolgreich verläuft.
Die richtigen Komponenten auswählen: Schrittmotor und Treiber verstehen
Es gibt zwei Haupttypen von Schrittmotoren: unipolar und bipolar. Unipolare Motoren haben in der Regel fünf Drähte und eine gemeinsame Verbindung für jede Spule, während bipolare Motoren vier Drähte mit separaten Spulen verwenden. Die Wahl des Motors beeinflusst die Steuerungsmethode und die benötigte Treiberschaltung. Bei der Auswahl eines Motors ist es wichtig, die spezifischen Anforderungen deines Projekts zu berücksichtigen.
Für unipolare Motoren ist der ULN2003 ein beliebter Treiber, da er über integrierte Darlington-Transistoren und einen Überspannungsschutz verfügt. Bipolare Motoren hingegen können mit dem L298N H-Brücken-Treiber betrieben werden. Für fortgeschrittene Anwendungen bieten Treiber wie der A4988, DRV8825 und TMC2208 zusätzliche Funktionen wie Microstepping, was zu einer sanfteren Bewegung führt.
- Unipolarer Motor: 5 Drähte, einfacher Anschluss.
- Bipolarer Motor: 4 Drähte, benötigt komplexere Treiber.
- ULN2003: Ideal für unipolare Motoren, kostengünstig und zuverlässig.
- L298N: H-Brücke für bipolare Motoren, vielseitig einsetzbar.
- A4988: Unterstützt Microstepping für präzisere Steuerung.
Schaltplan erstellen: So verbindest du Schrittmotor und Arduino korrekt
Um einen Schrittmotor erfolgreich mit einem Arduino zu verbinden, ist es wichtig, einen klaren Schaltplan zu erstellen. Ein gut geplanter Schaltplan hilft, die richtigen Verbindungen herzustellen und mögliche Fehler zu vermeiden. Beginne damit, die Pins des Motors und des Treibers zu identifizieren. Die meisten Schrittmotoren haben spezifische Anschlussmöglichkeiten, die je nach Typ variieren können. Stelle sicher, dass du die richtigen Drähte verwendest und die Verbindungen fest sind, um Kurzschlüsse zu verhindern.
Ein häufiger Fehler, den Anfänger machen, ist das Verwechseln der Drähte. Überprüfe daher immer die Dokumentation deines Motors und Treibers, um sicherzustellen, dass alles korrekt angeschlossen ist. Es ist auch ratsam, die Verbindungen vor dem Einschalten des Systems zu testen. Nutze ein Multimeter, um die Kontinuität zu überprüfen. So kannst du sicherstellen, dass alles ordnungsgemäß verbunden ist und dein Arduino sowie der Schrittmotor sicher betrieben werden können.
Wiring-Diagramm für verschiedene Schrittmotoren und Treiber
Es gibt verschiedene Typen von Schrittmotoren und Treibern, und das Verständnis ihrer spezifischen Schaltpläne ist entscheidend. Hier ist eine Übersicht über einige gängige Kombinationen:
| Motor-Typ | Treiber | Wiring-Diagramm |
|---|---|---|
| Unipolarer Schrittmotor | ULN2003 | 5 Drähte: 1 für jede Spule, 1 gemeinsame Verbindung |
| Bipolarer Schrittmotor | L298N | 4 Drähte: 2 für jede Spule, keine gemeinsame Verbindung |
| Bipolarer Schrittmotor | A4988 | 4 Drähte: 2 für jede Spule, ermöglicht Microstepping |
Mehr lesen: Arduino mit Motor: So steuern Sie DC, Servo und Schrittmotoren effektiv
Grundlegende Steuerung: Mit der Stepper-Bibliothek arbeiten
Die Stepper-Bibliothek von Arduino ist eine einfache Möglichkeit, um einen Schrittmotor zu steuern. Um die Bibliothek zu verwenden, musst du sie zunächst in deinem Arduino-Sketch einbinden. Das geschieht durch die Zeile #include . Danach definierst du die Anzahl der Schritte pro Umdrehung, was je nach Motor unterschiedlich sein kann. Eine gängige Einstellung ist 200 Schritte pro Umdrehung für Standard-Schrittmotoren. Anschließend erstellst du ein Stepper-Objekt, das die Pins angibt, die mit dem Treiber verbunden sind.
Nachdem die Bibliothek eingerichtet ist, kannst du mit der Steuerung des Motors beginnen. Um die Geschwindigkeit einzustellen, verwendest du die Funktion setSpeed(), wobei du die Geschwindigkeit in Umdrehungen pro Minute (RPM) angibst. Die Bewegung des Motors wird mit der Funktion step() gesteuert, wobei du die Anzahl der Schritte angibst, die der Motor sich bewegen soll. Positive Werte drehen den Motor im Uhrzeigersinn, negative Werte gegen den Uhrzeigersinn. Diese grundlegenden Befehle ermöglichen es dir, den Motor einfach und effektiv zu steuern.
Tipps zur Optimierung der Motorsteuerung mit der Stepper-Bibliothek
Praktische Anwendungen: Schrittmotor-Projekte für den Alltag nutzen
Schrittmotoren finden in zahlreichen Anwendungen Verwendung, die präzise Bewegungen erfordern. Ein bekanntes Beispiel sind 3D-Drucker, die Schrittmotoren nutzen, um die Druckköpfe in X-, Y- und Z-Richtung zu bewegen. Diese Motoren ermöglichen eine genaue Positionierung, sodass die Druckqualität hoch bleibt. Auch in CNC-Maschinen sind Schrittmotoren entscheidend, da sie die Fräswerkzeuge präzise steuern. Hier wird die Fähigkeit der Motoren, in kleinen Schritten zu arbeiten, genutzt, um komplexe Formen und Designs zu erstellen.
Ein weiteres praktisches Beispiel sind automatische Türen, die Schrittmotoren verwenden, um sanft und kontrolliert zu öffnen und zu schließen. Diese Motoren bieten nicht nur eine präzise Steuerung, sondern auch eine hohe Zuverlässigkeit. Darüber hinaus kommen Schrittmotoren in Roboteranwendungen zum Einsatz, wo sie die Gelenke und Bewegungen von Robotern steuern. Diese vielseitigen Anwendungen zeigen, wie wichtig Schrittmotoren in der modernen Technik sind und wie sie dazu beitragen, innovative Lösungen zu schaffen.
- 3D-Drucker: Ermöglichen präzise Druckbewegungen und hohe Druckqualität.
- CNC-Maschinen: Steuern Fräswerkzeuge für komplexe Designs.
- Automatische Türen: Bieten sanfte und kontrollierte Bewegungen.
- Roboteranwendungen: Steuern Gelenke und Bewegungen von Robotern.
- Fotografie-Equipment: Ermöglichen präzise Kamerabewegungen für Zeitraffer.
Roboter und CNC-Maschinen: Schrittmotoren in der Praxis
In der Robotik werden Schrittmotoren häufig eingesetzt, um präzise Bewegungen zu ermöglichen. Ein Beispiel ist der Einsatz in Industrierobotern, die Aufgaben wie Montage oder Verpackung durchführen. Diese Roboter benötigen eine genaue Positionierung, um ihre Aufgaben effizient und fehlerfrei zu erledigen. Schrittmotoren bieten diese Präzision, indem sie in kleinen, kontrollierten Schritten arbeiten, wodurch die Bewegungen wiederholbar und zuverlässig sind.
Bei CNC-Maschinen sind Schrittmotoren ebenfalls von zentraler Bedeutung. Sie steuern die Bewegung des Fräswerkzeugs entlang der gewünschten Achsen. Dies ermöglicht die Bearbeitung von Materialien mit hoher Genauigkeit, was in der Fertigung und im Maschinenbau entscheidend ist. Die Fähigkeit, die Geschwindigkeit und Beschleunigung präzise zu steuern, verbessert die Effizienz und Qualität der bearbeiteten Teile. Trotz ihrer Vorteile müssen bei der Verwendung von Schrittmotoren in Robotern und CNC-Maschinen auch Herausforderungen wie das Gewicht und die Größe der Motoren berücksichtigt werden.
Dynamische Geschwindigkeitsregelung: Potentiometer zur Steuerung verwenden
Ein Potentiometer ist ein nützliches Werkzeug, um die Geschwindigkeit eines Schrittmotors dynamisch zu steuern. Um es zu verwenden, musst du das Potentiometer korrekt mit deinem Arduino und dem Schrittmotor verbinden. Typischerweise wird das Potentiometer an einen analogen Pin des Arduino angeschlossen, sodass du die Spannung, die am Potentiometer anliegt, messen kannst. Diese Spannung wird dann in einen Wert umgewandelt, der die Geschwindigkeit des Motors bestimmt. Ein einfacher Schaltplan zeigt, wie das Potentiometer an den Arduino angeschlossen wird und wie die Verbindungen zum Motor erfolgen.
In deinem Arduino-Sketch verwendest du die Funktion analogRead(), um den Wert des Potentiometers zu lesen. Dieser Wert wird dann in die setSpeed()-Funktion der Stepper-Bibliothek integriert, um die Drehgeschwindigkeit des Motors anzupassen. Hier ist ein einfaches Beispiel: Wenn der Wert des Potentiometers zwischen 0 und 1023 liegt, kannst du ihn auf eine Geschwindigkeit in Umdrehungen pro Minute (RPM) umrechnen. Dies ermöglicht es dir, die Geschwindigkeit des Motors in Echtzeit zu ändern, indem du einfach den Regler des Potentiometers drehst.
Tipps zur Verwendung von Potentiometern zur Geschwindigkeitsregelung
Erweiterte Anwendungen von Schrittmotoren in der Automatisierung
Die Verwendung von Schrittmotoren geht über die klassischen Anwendungen in 3D-Druckern und CNC-Maschinen hinaus. In der modernen Automatisierungstechnik finden sich zunehmend innovative Einsatzmöglichkeiten, wie zum Beispiel in industriellen Förderanlagen und automatisierten Lagerhaltungssystemen. Hier ermöglichen Schrittmotoren eine präzise Positionierung von Waren und Materialien, was die Effizienz und Genauigkeit in der Logistik erheblich steigert. Durch den Einsatz von Sensoren in Kombination mit Schrittmotoren können diese Systeme dynamisch auf Änderungen in der Produktionslinie reagieren und so eine nahtlose Integration in bestehende Prozesse gewährleisten.
Ein weiterer spannender Trend ist die Verwendung von Schrittmotoren in Smart Home-Technologien. Hier können sie zur Steuerung von Jalousien, Türen oder sogar in automatisierten Bewässerungssystemen eingesetzt werden. Durch die Integration von IoT-Technologien (Internet der Dinge) können Benutzer die Bewegungen dieser Geräte über mobile Apps oder Sprachassistenten steuern. Diese Entwicklungen zeigen, dass die Möglichkeiten von Schrittmotoren in der Automatisierungstechnik und im Smart Home-Bereich weitreichend sind und in Zukunft noch weiter wachsen werden.